



El objetivo de este trabajo es implementar un algoritmo que permita el vuelo autónomo de un VANT por pasillos de adoquín color gris a una altura de 1m (altura prevista del despegue) de tal manera que sea factible guiarse únicamente con la cámara integrada del VANT de 14 mega píxeles la cual se utilizó para la captura de imágenes.
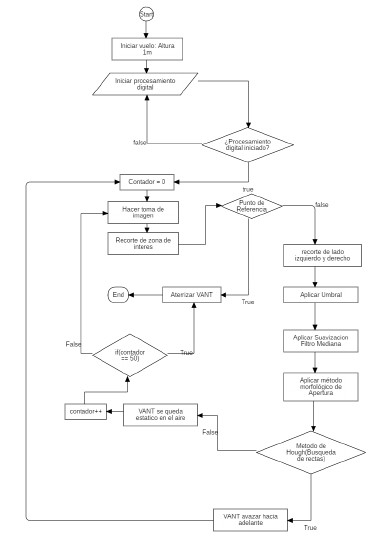
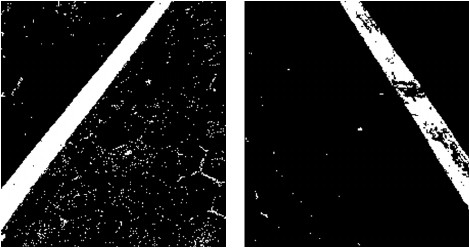
El algoritmo estará constituido de las siguientes etapas: umbralización para buscar los bordes del pasillo, suavización para eliminar ruido de la imagen, operación morfológica de apertura para definir el esqueleto de los bordes y finalmente, algoritmo de Hough (1972) para verificar que existan dos bordes en los pasillos.
Para realizar las pruebas del algoritmo se utilizó el VANT Parrot Bebop 2. Este VANT cumple con las características básicas para la investigación; además de su bajo costo, cuenta con un SDK (parrotSDK) con el cual se puede manipular el controlador de vuelo, la cámara integrada y la conexión por WiFi.
Citar como: Martinez-Luna, S., Sanchez-Acevedo, M.A., Martinez-Gil, C.C., & Marquez-Dominguez, J.A. (2019). Algorithm for autonomous navigation of an unmmaned aerial vehicle in gray cobblestone corridors. Revista de Aplicaciones de la Ingeniería, 6(18), 29-36. https://doi.org/10.35429/JEA.2019.18.6.29.36